实景空间数据的无人机地面混合采集数字重建入门方案PPT
各位今天晚上我们一起大家探讨一下,因为我们前面有一段时间是其实一直在从事无人机这么一个平台,然后包括一些空中和地面的这样的一个协同化的一个数据采集这样一个工作。这里的话,我自己也是建筑师出身的,应该也是跟高,为啥因为我们属于是上海建筑师协会这一块的话,其实在我们工程行业里面其实还是有蛮独照在是能够应用运用到位的,但是可能因为很多的设计师并不是会有很多的经历,或者说能够了解到足够多的这样的技术的或者支持的一个了解的深度,所以说我整理了一篇这样的一个简单的介绍,把我们这两年做的这个工作和在工程这一块的把数字化应用这块东西的一些尝试和大家一起再分享一下。
这里是几个我们前期做过的一些案例,这里其实包括了一个是在在一个丘陵地区的山顶上的整体的一个佛教的这样有旅游景区,然后还有一个是在城市副中心,这么一个核心区的位置,还有一块是是失败的一个制品的这样的一个博物馆。这三块其实是有三种不同类型的,我们现在是应用的一个这一个场景,比如说可能就跟刚刚分的三个类,一个一类都属于是我们在向园区景区这一块的应用。一类是在城市的一些更新改造这块的一些的需求的应用,还有一块就是说我们在一些历史文保或者是说一些遗址保护这一块,现在有一些很多的这样的一个应用在里面。
无人机这一块其实我们把它当成一个工具,这个工具其实是可以用来做一个数字化的孪生的一个应用的工具,都是为了能够得到一份我们能够获取的一个这样一个实景的数字化转身,大部分的可能性它是一个空间信息,那些隐藏的一些其他的信息,包括可能像质证像一些地质地矿这一类的情况,可能还很难去获取到,但是空间信息这一块的其实是一个很大的进步,因为以前传统的方法做一方面的话可能是人力成本特别高特别长。第二就说可能一个跟其它各个专业的一个协同性可能就比较比较差一点,中间总是差了一口气,现现阶段的话,像这一块的应用的话,可能是在我们能够罗列出来几个大类里面可能会有一类就是我们的工程行业,一类就是说向园区景区更多的可能是在对于管理和运维这一块。
文保展示这一块可能是从空间到一直保护到对于一些高精度的现场服务的一个扫描这一块。然后还有一些包括就像我们的一些光伏产业那些电力、输配、输配电这一块的很多的运维的应用。我可能这一次因为可能时间比较短,我简单把它罗列了一下,我们可能日常可能用的会比较多的几类的应用,而且后面可能我会讲一个对于目前我们可能设计行业自己本身是不是可以依托我们自己现有的一些条件,包括我们的一些技术人员一些设备的条件,能不能从一个比较简单的一个入门的能够开始操作这件事情,然后能够逐步的不断的提高到应用。
然后实景的这块的应用可能也有几大类,这一块的话就可能像我们前面空间数字化的这块,空间数据的应用的话,可能在工业行业工程之事管理。文保,但是这一块可能会比较多,而且分别可能是有不它不同的应用场景和他的应用的要点的一些特殊性的要求,因为像可能供很多工业行业可能更多的是对于一些既有的一些一些现状的一些数据的采集。因为很多工厂可能当时建的时候,也没有办法数字化,当时很多都是纸念的图纸,居然有存档,可能时间也已经很长了。
第二的话可能很多工业流程在中间有改造,改造完了以后可能跟原始的图纸之间的匹配,可能就很难去对起来了,那可能是需要有一个现实的1:1的这样的一个真实的数据。工程行业这块其实我们前面有也有做过连续跟踪的一个单个工程的这样的一个项目,就可能再一个项目的不断的进程当中,分阶段从项目初始到一些方案阶段、施工阶段,甚至后端运维可能是一个延续的过程。城市管理这一块的话有很多的现在碰到一个存量改造的事情有很多,城市核心区可能已经不是新建项目,而是一些改扩建,或者是说一些修缮风貌整治这一类的话可能也是需要有很多的技术的支持,才能够减少我们一些靠人去现场去做这样的一个工作,不然的话就很多的工作会变的整个流程会变得很长,而且是很难去靠全人工去完成文保这一块的很多的应用产品,其实我们从原先包括一些激光采集,在逐步再把一些用无人机,还有近景摄影这一块的技术在应用在上面这一块主要还是从降低整个的进入的门槛和提高效率,然后是降低综合成本。
工程这一块的话,可能像这边这边旁边右边土地上,其实我们应该是前年跟年底后面跟一起在做的一个上海的一个城市核心区的其中某一个改造的这样的虚拟的项目,它其实是在一片整个的已经建成了住宅,商业混合区当中可能有一块像兄弟要作为一个城商业综合体的这么一个开发,然后这块因为又处于上海的一个比较重要的一个景观带,因为他离上海陆家嘴特别近,我们再用这样的数字化采集技术,把整个周边的一个街区全部都扫描下来以后是和我们的设计院和我们的闭幕的服装一起,其实把整个城市片区做了这样数字化的重现,然后再把一些设计意图,包括后期的对于这个项目的一个不同的这样的介绍定位,甚至于把后端的营销这一块的一些要求,都能够在前期能够完成。
这一块的流程当中,其实首先是其实基于一个实体模型来代替我们以前传统的一个人,全部都靠人工去做一个基础调研这样的一个工作。然后有了一个模型数据以后,我们可能可以在一段下一个阶段的设计流程当中,其实把模型作为一个数字化的一个成果,然后去和各个工种各个专业去peak,特别是在我们可能在规划和建筑阶段的时候,可能在这一块可以和包括各个部门去做的这样一个协调跟规划,城市管理,包括业主,包括政府,包括后端运营方,未来怎么样去把以后的这些工作能够通过真实的这样的数字化场景去呈现出来。
有了三维数据以后,其实我们在一些我们的设计流程当中,我们其实有一个数字话可以评估的,包括我们可能对一些特别是对一些地形比较复杂区域的,我们可以做一个非常非常快速的一个三维的数字化评估,包括土方,包括这些高层点,包括我们可能是在设计标高这一块,可能是提供一个很好的这样的工具。然后有了一个数字化孪生以后,在后端我们其实有一个很好的这样工程管理的这个时间进度表,有点像我们做的一个灿烂一样的,不同的阶段的、不同的数据信息完全在一起。
大家看到的这个项目其实是在南京,老三的一个这样的一个旅游度假的综合体,包括酒店,包括主题公园这块可能是在分析建造。首先垫到这一块区域,就是酒店那个位置,这块区域因为原先坐落在一个石矿坑里面,整个的地形的高差,垂直落差大概有一百三十几米,如果再加上场地里面是挖石头已经挖下去的,可能还有大概30米到40米左右这样的一个高度。所以说整个项目其实在一个非常复杂的地形上,然后这里包括设计师的一些意图,也是把一些山D型做了一些做了一些处理。
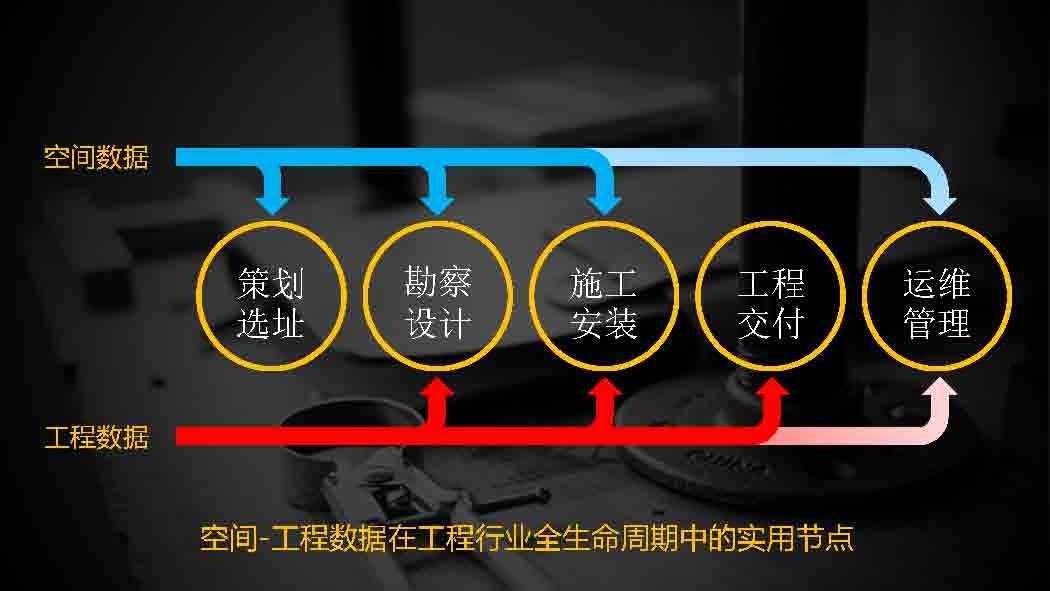
这个东西就要求对于场地上面所有的山的位置,包括空间几何尺寸,都要比较精准,因为否则的话他没有办法对三体进行进一步的加工,因为他最后在伤体上面其实是做了两个非常巨大的一个城市尺度的这样的一个雕塑。整个空间数据的流程,从我们现在工程设计的周期来讲,其实从策划到勘察设计到施工安装这个阶段,其实是可以依托我们现有的空间数据,去做一个非常好的这样的现状的一个比对,和我们设计方案的这么一个相互之间的评估。工程数据其实在整个过程当中,像一般按照我们现在国内的正常流程,其实在选址阶段和后端运维阶段,其实是很难去说是介入到这个里面,这里面为什么我们现在有很多闭幕,可能要把自己的服务延长到后面CM这块。
前端其实在策划这一块其实一直是属于全部都是靠人的经验,靠比较传统的一个数据收集方式去做的,所以这一块如果是我们能够把空间数据和工程数据这两块能够有机的结合起来,其实在中间很多的环节里面是可以做一个互补。景区羊群这块其实有很多其实是作为是一个展示和管理这两个方面。展示就可能比较简单,大家能理解就说很多可能我们像这样的一个大的一个景区或者是一个小的景区,我们希望能够有一个直观的管理的话,这块的话可能涉及到很多,可能跟我们那个系是相关的,因为有很多景区里面可能涉及到一些安防一些消防管理人员这些密集度,包括一些场地,包括一些空间管理都会在上面去完成。
然后景区这块其实我们引申一下,景区和园区一些需求基本上是不同的。有很多像一些包括产业园区,可能有一些更新的园区,包括在延伸过来,可能像特色小镇,或者是局部的旧城改造,这一块的需求其实是基本上都是一个同类型的一个产品的需求,首先是对于一个空间、空间可视化的一个要求。然后再是一些对依托空间可视化以后,然后包括比如是这些数据能够传导到比如说是设计方、施工方,甚至于后端的宣传旅游文化部门。文保展示这一块其实可能比较形象,因为文保长这块可能以前传统的很多都是还是拿激光点云在做。
激光做这个有它的优势,第一是他可能相对来说准确率会比较高。第二的话可能整个的一个现场的一些条件或什么的,对地面上的一些东西,对激光的话可能有点有点约制作用,因为很多假单什么的可能会需要有一些搭建,甚至有些场合可能也很难去有一定的安全隐患。无人机有了以后,其实这块有很大的一个自由度,也包括使用无人机可以去做一个高分辨率的这样一个图像采集,其实无人机本身也可以携带激光扫描仪,当然这些成本可能相对来说比较贵,因为机载的设备和地面设备之间可能还是有很大的差异,一个是可靠性,一个是机载平台的可靠性,还有一个就是说是本身两套设备在一起的一个荣誉度,包括一些安全性的考虑,所以说这些设备可能往往都是百万级别,一般可能正常我们也可能不太会用到,但是现在入门级的一些无人机的一些高分辨率的采集,其实已经完全可以达到这样的一个非常高的进度,而且在某些方面,比如说像材质戒毒这块的方面,由于采集的效率还有再加上计算平台这一块,其实可以大的减少一些一些人工需要做的工作。
因为这块其实像一些古建的高高分辨率的采集,包括对一些传统的一些文保的数字还原,动态的一些做媒体,包括一些做改工程的这一块,光伏的这块可能是跟我们工程比较接近,但是光伏这块可能另外的话它还有一个应用是说在于说机载设备的不一样,因为光伏的话我可以用一些多光谱、高光谱、红外这些。
你这做非常好的这样的一个整体的这样的扫描。
光谱这一块,很多时候这个场景其实还相对来说比较单一,因为基本上光伏电厂都是I咱们在那个片区的它所需要达到的一些要求,其实也是一些为喂饱检测这样的要求。主要是要对于现场的一些元器件,包括很多的一些变配电的设施设备,是不是有一些破损或是加载,或者是其他的这样的一个情况的,现场对于数据采集起来其实相对来说很简单,不像我们可能公司账很多,因为受制于空间特别复杂,而且很多建筑店主本身的形外形的尺寸又特别的复杂。
所以像这一块光伏其实有一点跟我们工程类是比较接近,它其实有一个选址勘察这一块的。选址勘察,其实风电场对于选址要求其实还蛮高,因为它对于周边的环境还有日照时间都有一定的要求,而且对于很多光伏电厂,可能现在有很多事做在园区的屋顶上面,有些园区屋顶上面可能本来也是不上人,屋面很难有有这样比较便捷的能上去。所以这一块的话,其实在选址这一块,其实跟我们在做工程类的这块比较接近,很多用到快速的大片区的无人机采集数据以后,然后再有了一个统一的数据以后,再去做一个整体的一个评估和一个选址。
电力运维是可能这一块是无人机应用可能是比较早,这块跟我们工程之间有什么关系?因为最早其实无人机用在电力行业里面,主要是在群这些和也假。这是两两两个主要的一个工作,很多时候还是人人工在飞,但是它的效率可以大大提高,因为以前都是靠人去长途跋涉去做,现阶段有很多是什么?是在做电力改造工程。电力改造工程其实涉及到的其实是一个选址优化,还有一个就是说是可以把我们后端的设计阶段B木这块的数据,能导入到我们这样的一个选址的平台上面去了。
这块包括可能桥架这些东西可能相对比较简单,有好多店里的电站,包括大型的电力枢纽,都在弄。因为我们去年就做了一个在北京也是我们一个很好的要好的朋友,他们他们公司是做的B母服务这一块,也是亚洲最大的这样的为了奥运会的被的这样一个能源输送系统,又在一个比较复杂的地形里面,然后D型里面周边的环境和已有的电力系统之间一个一个衔接,包括还有有周边地形加上病模型以后有一个现场施工的这样一个计划,因为空间比较狭隘,很多施工的包括一些调车什么的,其实它能够执行的活动半径也有限,很多工作其实要预先做好。
所以这一块的话,其实有了这样一个通过空间模型和B模型这样去做一个搭配的,然后是合在一起以后去给到施工这块提供一个非常好的这样模拟预言。这个是另外一个电力行业的项目,是在长沙那里,正好是在他的高铁站旁边,然后是有一个电力通道,重新做铁塔和有书信输变电的一个通道,所以存在一个选址的问题,然后出发区域里面,因为正好还旁边是旁边是高铁,很多地形比较复杂,所以说整个线缆从高铁上面穿过来,哪些位置比较安全,所以说这块这块的对于设计选址其实不单单是可能是我们工程行业可能是包括电力输配电这一块,他们有很多的数据是已经应用到他们整个系统里面。
这个是电力的一些常用的,因为像电力这块可能常用的一些需要做的事情里面,其实有很多是依靠无人机的所载的载具采取可能是一些从外国的光谱的这个东西可以非常非常明确的去找到这个说结构上的一些可能电力荷载过多,或者是一些结构易损件,包括一些耐久性的一些一些元器件,可能是一些结构件是不是已经老化了,能够很快的检测出来。当然我今天可能稍微着重讲一下,我们现在比较关心的就是一个高精度的一个数字孪生的这样的数据的生产,因为传统的不管是用无人机也好,或者是说用一些激光扫描去制作,大部分都咱们咱们一个兄弟单位,可能是像社会这个行业他们在做,但他们一般对于的进度要求可能也没做到太高。
除非是有一些可能是单个的去做一个非常高精度的这样激光扫描的那个是有,但是他不是很普及,而且应用成本也相对来说比较高。现在其实有了无人机以后,其实有了一个非常好的这样一个高效的采集手段,打击手段可能对应的,比如说我们需要做到多少精度,可能只要把我的这些硬件设备的一些一些指标能够得到一些提高,我就可以可能能够做到一个很好的这样的数字化的成果。一般像这样的话,我们可能是分成几个大的,一个是一个步骤,首先是一个无人机的隅,现场数据采集这一块,这块其实可能很多人还没有注意到,就说数据采集其实要求是挺高的,因为这一块其实不单是你飞机出去以后能够能够快速的把采集的一些包括高分辨率的一个照片能够拿回来,而且是说对于像这些高分辨率的照片,对于在我们后端做融合计算和数据处理的时候,其实它是有一定要求的,包括清晰度对吧?
包括一些照片的紧身,对吧?所以这块很多的一些需要注意的一个情况。融合计算这一块其实主要还是一个我们可能要选择一个比较合适的计算的平台或者一个方式,因为有多种方式可以去做,但是每一种可能各有它的一个优劣。像数据处理这一块,其实是为了我们自己行业应用这一块的,因为传统很多的生产出来的数据大部分都是技术标准的一个数据。这个数据在我们不管是我们做bim或者是做房建这一块,其实很难去用。看看可能可以,但是如何变成我直接能够用的数据这块可能还是有一点有一点差距。
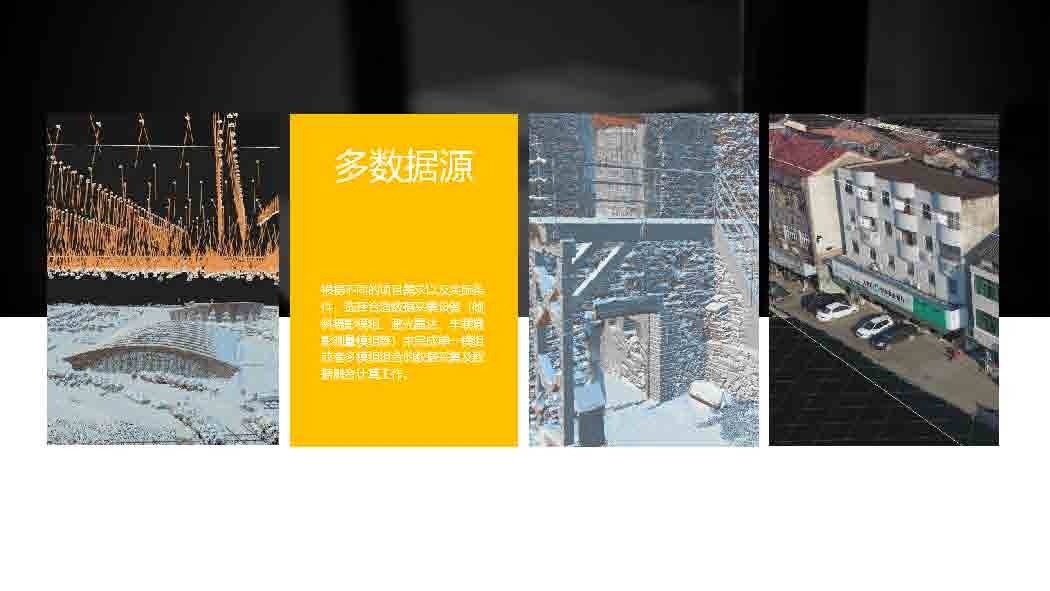
包括数据发布,数据发布可能是分几块了,那一块是说我们可视化的数据,这块怎么样能够快速的让所有人都能够看到,还有一块就是说是对于其他数据平台的一些衔接的要求。像一般数据采集的话,其实以无人机为主,无人机可能能够覆盖掉我们大概百分之七八十的能够使用的数据,因为特别是对很多场景里面可能比较简单,而且也没有太多的遮挡,无人机基本上能够覆盖完他,如果是你要碰到一些可能相互之间争遮挡会比较厉害。可能会有很多需要去做局部加强的,局部加强可能是用无人机去做,也有可能是用地面设备去做,地面设备可能是一些手持的,也可以是做一些车载的这样一个设备,这块我可能待会我会把它再看看,来讲一下有哪些可以用的那些设备。
然后还有一个就是说除了无人机之外,可能我们可以也把近景摄影测量和激光测量的数据,也可以坐在一起去做一个融合计算的。飞行平台可能就说简单一点,就可能就是无人机,无人机现在种类其实挺多的。
一般的情况下面,就是说如果是说大概可以分成几类,一类就是我们现在我们用的比较多的这种民用级的,还有一类行业级的,可能是相对来说对于像一些三防的要求下去,抗干扰的一些要求都会比较高,而且它可能能在一些比较恶劣的环境下面去做一些作业,有一些小雨这样的情况下,它还可以正常作业,但是一般正常情况下面,其实我觉得一般我们民用级的能够做到一个可靠飞行的这样的一个要求,也可以满足我们的很工程行业的基本的要求,没有必要说坐到要行业,因为行业级用的比较多的都是一些高风险的一些行业,比如像电力,就像一些化工或者一些码头,那些这些地方,因为对于飞机的一些可靠性和一些像抗腐蚀、抗干扰这些抗水这些的要求会比较高。
我们正常一般可能工程现场的话,可能这些要求都还可以能够在一定的范围里面可以接受掉。我特意给他大家留了一些参数,可能大家可以看一看,有一般像现在无人机的起飞的重量一般都是在10公斤以内,在网上的话可能就对一些无人机来说可能已经不太是的,因为它大部分的家长的这些能源都是用来在抵消它的电池的重量。所以一般的话,我们觉得像这种正常的情况下面,一般10公斤以内的飞机可能相对来说比较适用一点。另外一个就是说考虑到一些意外情况。
无人机因为在空中它不像汽车,我还可以刹车给停下来,无人机一旦停下来就是坠毁了。所以说有一定的这样的一个风险了,所以对于这一块的话,我们是更建议说尽量用轻刑的这样的一个无人机平台,重量越轻越好,只要能够达到一个基准的这样的采集的要求,没有必要去做非常高的这样一个重量的飞机。当然我这边可能讲的比较多,可能这块是对于像多旋翼无人机类型,因为还有内务无人机是属于固定翼的,固定翼的话本身可能就是说他飞机重量也不会太高,很多都是轻轻量化的一个设备和模块。
像一般的飞机可能能够这样的多旋翼的无人机能够在空中执行的时间也差不多半个小时到40 4 15分钟之间,超过这个时间,其实一般都是能耗比就已经没有办法就做得不是那么的经济了。很多的可能能量损耗都是用在抵抗自身的重力上面。采集设备这块其实有很多可以选的,就像我这边上面的几张,一个是这种航空的专业航空镜头的,一种是由现在用的比较多的镜头的景节的,也是引用的专用的设备,还有将激光一载的激光的扫描仪这一类的我这里有一个其他设备吗?
其他设备其实是用来作为一个无人机的采集数据的一个补充,可能我们常用的一些能够拿到手的一些设备,等单反手机,甚至一些高分辨率的一个摄像机,这一类都是可以的。作为一个地面数据的采集的补充,我就可以融合计算这一块应该有好好几个这样的一个计算平台,也有独立的软件的,也要通过云计算的这一类的,其实它各有各的优劣,因为对于一个像无人机采集的数据来说,它避免不了的一个是什么?非常大的数据量。这些数据量如果是在可控范围里面,很多可能好一点的设备的话,可能单机你还能可以做,但是一般的话,我们就话超过四五千张以上的高分辨率的照片的话,那就不是就可以做这样的一个工作了,可能会涉及到要做工作站,甚至于要做一个私有云,做一个集群运算,才能够去把整个数据预算出来。
而同时其实我们现在有很多的计算平台是可以兼容各种数据来源,包括我刚刚说到的这样的激光点云的一个融合,还有车载的一些红外的测量的一些数据的融合,倾斜的摄影的数据的融,这些东西其实多重融在一起以后,其实能够整个的提高最终成果的这样一个质量,还有一个它的一个精度。数据处理的话有很多照在我们数据处理这块还没有完全的自动化生产的一个很多可能数据处理还是靠人工来做。这块不管是我们拿到手的像典型数据也好,或者是说你到手的一个上围的max的模型也好,这块的很多后期的工作其实还是人工一步步去把它来完成。
但是他可以很很大的解放我们自己,对于像一个大夫地址有点问题,我再34栋2404,34栋2404,我继续往下拿。对的。谁再说话吧?尽应尽了,我继续OK这块的数据处理的话,其实这里有一个从宏观到这样的具体的三个不同的案例,第1个是一个小镇,整个小镇一个片区,包括它的镇区和周边一个环境。第2个是一个一个建筑群,邮件的整体。第3个其实是一个建筑单体,我们三三个不同的这种项目里面其实碰到的事,三个不同的需求,一个整体的需求,其实对于说一个向小镇级别的一个整体小镇的一个宏观的、层次的片区的影响,像一个建筑群体,其实很多的时候,我们已经涉及到像一个建筑单体的一些空间尺寸的精度,周边环境,然后包括可能对于一些建筑本身的外立面平面的一些要求,最右边其实已经是涉及到单个单体了,因为这个是一个旧改的一个项目,就改这个项目里面就说很多城市老区其实没有图纸,而且有很多都是违章建筑,但是这建筑可能也差不了,他只能去优化。
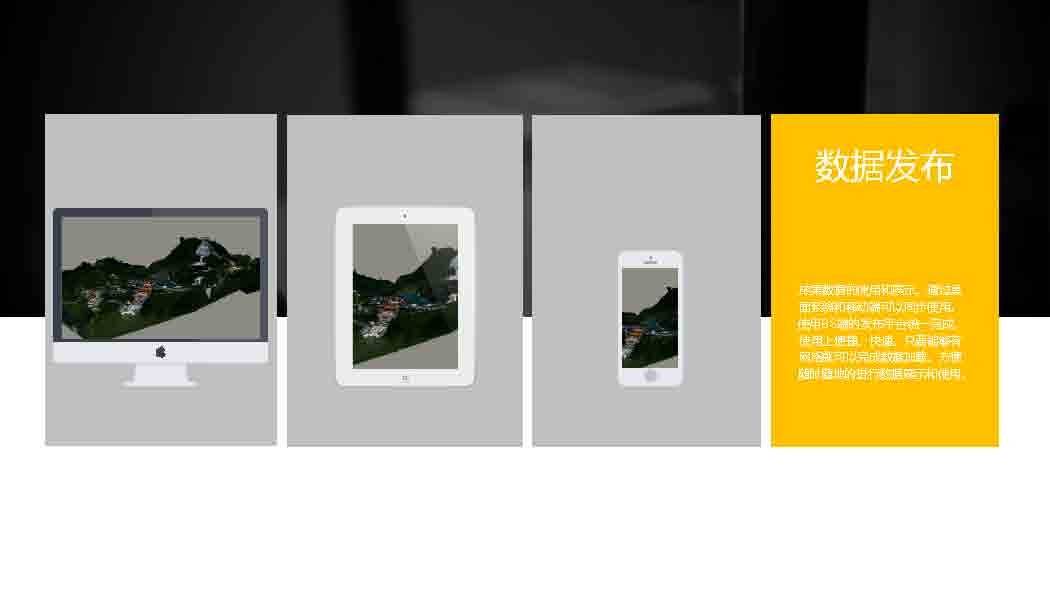
这些所有的图纸,你让让设计院去完成,也完不成。要很快的去去搞定这件事情,可能必须得采用一个比较高效的一个方式,而且高压方式能够产生所有所需要的数据的这样一个结果。对于像数据发布这一块很独振,我们现在的数据都可以支持像外部gl的这样的一个这个标准的一个工作流了。包括现在我们很多提交给我们合作伙伴的闭幕这块的数据的话,可能符合闭幕的这块他们具体的要求的一些空间数据,可能像ob或者是FBX这一类都是用的比较多的。
对于像我们一些设计师的朋友,特别是在前期策划阶段,很多时候我们可能能够提供给他一套4个hf的标准格式的一个这样的数据,而且是帮他做好做好整个的空间数据优化以后,让他能够是在自己前期的一个设计阶段的时候,把它当成一个实景的这样一个现状的环境,然后把自己的设计就是融合到融合到它真实的一个环境里面去。像这一块的话,其实因为基于外部接耳的话,其实可以做不同的平台的这样的一个衔接,包括移动班这块的数据化衔接其实都是没有什么问题。
好,我再来讲一下景杰摄影和近景摄影这两块的一个结合的这样的一个一个工作流,右边看到的,其实我们在南京做的栖霞市的一个一个古塔,古代应该是北魏时期的。整个的塔的数字化,扫描,包括一些处理,全部都是在一拖!警戒摄影家进行设计去完成的!没有去使用激光扫描,bestOK有一张图有点问题,然后我们采用的飞机的一个不好意思。我们采用了飞机的采集设备,这一块其实用的比较多的,现在是最成熟的一个牌子还是大家。因为大家可以看到这三类正好是大家三个不同的类型,一个是大家金陵寺系列的,一个是大家预习列的,还有一个大家事物。
不谢。这三类常用的无人机的设备是现在我们用下来是可高兴?最好的。因为因为这里涉及到两个问题,一个是飞机本身的这样的一个可靠性,还有一个就是飞机控制系统的可靠性,还有一个就是说是飞机和镜头的一体化。三、从这三个角方面来讲,大江这块的很多的一个成品的设备应该是可靠性最好的。避免这块采集其实其实有多种方式了,因为像这块的话,地面采集其实我们基本上用的是单板。大家!奥斯摩的系列的叉5的头,还有就是说我们用了3360的这样一个全景的这位,这些都是可以从地面去做非常好的一个高精度的数据采集的。
然后大家看一这张,这张其实是在一个山区里面,上面的这些航迹都是都是无人机在空中的这样的一个照片的一个拍摄点。对于整个这样的一个片区要去做采集的话,其实对于空中效率大家可以看得出来非常的效率还非常的高,因为有了距离和这样的一个相机的视角以后,其实在一定的高度上面整个的覆盖率还是蛮高的,但是这里面你可以看到,其实这里因为这张图可能稍微有点对于下面细节可能看不太清楚,他其实在研究这一块是做了非常高密度的地面的数据采集,大家可以看局部,其实在除了整体的一个大范围的数据采集之外,对于像这些沿街立面,包括中间一个一个大的雕塑,这一块都是做地面加强和一部分在做局部的空中无人机采集的一个加强。
这张就是我们做的7家是塔的整个的一个空间采集,包括地面采集的一些角度和数据,也可以这里可以看得比较清楚,我们基本上是把整个整个塔身已经全部都包围了。这个是其实在塔的右侧。西侧其实有原来一个北魏是留下来的这样的佛龛,有很多的这样的一个佛性雕塑是在佛龛上面,这块也是采用了无人机加上避免这样的一个数据采集。所以可以看看到后面其实看看得比较清楚,就是说无人机数据采集如果是用高分辨率的照片来做的话,因为它有一个比较大的好处,就是说它可以把这些所有的那些空间体的外表面的才智能够做非常好的这样的表现。
这一点可能是正好是激光扫描可能很难达到的。这个是高分辨率的截图。所以大家可以看一下,像一些一些植物,包括一些表面的石头的一些纹理,其实还是看得非常的非常精致,而且佛像的这些雕刻的一些衣服上的走字都已经非常清楚了!这个是上海松江方塔园的一个方塔,这个方塔应该还是一个糖似的,但它整个的一个高度相对来说还是一个比较收藏的一个这样一个塔身。这块也是采用了无人机加上地面的高分辨率的近景摄影,去做的这样一个数据采集。
这块跟我们可能以前传统做的看到的这些倾斜的数据有点不一样,因为倾斜的数据只有外表面、下侧和内侧其实是没有的。因为这块是在空中其实无人机是看不到的地方,看不到的地方是不会有出现任何的空间信息的。只有在近地面去做了一些这样的一个数据补充,最后出来的这些成果,它会是一个完整的。所以大家可以看像一些把下面的这些柱子和住处都可以到了一个比较高的精度,这个是他差的部分。这是既然是舍利塔的一部的照片,所以上面两个案例,其实我觉得已经可以借用我们的比较好的一个无人机这样的平台,按照一定的这个样子,我们的一些数据采集的要求,和我们后端的一些在优化过程当中的进一步的去把这些数据做一些包括一些降噪处理,包括一些优化,都可以来把它变成一个非常优于激光扫描加上照片、贴图这种方式去做的。
什么样的一个工具?这些都是局部。OK,然后我接下来可能向大家讲一讲讲一个就是我们自己认为的,可能是对于像我们现在设计工程这个行业有没有可以有一套能够马上简便操作马上就能入手,而且相对成本可能是每个设计单位都能够接受的这么一套。性价比的需要。入门设备了。飞云平台这一块其实我觉得大家还是可以去选一下主流的飞行平台!大部分可能比如向大家像一些E行的,但是我确实下来以后觉得还是大家的一行的靠谱对吧?还有一些像浩翔的对吧?这些基本上就是除了大疆之外,其他的飞机可能在一些操作的可靠性上面的距离跟大家差的可能不是一点点,基本上差了一一袋以上,对吧?大家现在很多的飞机对也都已经带了,像自动避障这些功能,可能对于一些新入手的一些小白能够比较安全的去操作。
现现在市面上能够通过商业渠道能够买到的台上这个设备,我帮大家大概理了一下,第1类就是像金陵是一系列的。我们看两个两两个要素,一个是携带的摄像头的一个上诉的一个要求。另外一个就是起飞的重量,因为像素是决定了我们能够采集的得到的相片的一个精度。起飞重量其实是个安全考虑,对吧?重量越轻也不是越好,因为重量越轻,可能在一些大风的情况下面,飞机的稳定性就会比较差,所以它应该是一个比较适中的,但重量轻也有它的好处,它携带方便就带起来,就可能包里面一揣就能走,对吧?
这是三类,包括金陵玉和物2,Y本身跟其他两个有点不太一样,-2的话它是可以自己可换镜头的。底下可以搭载是差5S或者是叉7,这两两套他的采集系统都可以。如果是叉5的话,可能等于根据04都差不多。2000万像素左右。如果是叉7的话,可能能到2400万小时。但是叉7更偏向于是说做视频采集,主要是用来做拍一些影视一些4K的一些数据。从重量上来来分的话,这三个可能相差都挺大的,对吧?金陵事的话反正基本上就比较适中。
玉大概只有金陵寺的2/3,物肯定是要重一倍以上了。三这三个里面我更偏向,于是建议是说大家可以选个金菱智系列,因为第一成本低,重量是中。一个背包可以背的起,再加上几块电池,基本上也可以用了。不像物大箱子一个到处携带起来也不是很方便,玉确实方便。但是如果是小范围的场景的去做数据采集的话,玉可能还可以。如果一旦是零点以0.2以上的这样的一个范围,平方公里的面积以上,可能遇相对来说可能就会比较吃力一点,因为毕竟它的总的重量比较轻,而且一些抗风性能可能都不是很好,大范围的时候容易在空中定位上出现比较大的一个偏差。
这个费用其实愈合经营差不多。基本上就是万把块钱。无二,根据你配的投资不一样,可能从2万到10万都不等。还有好多专业级的一个配件,包括一个专业级的遥控,还有整个的一个电池管理系统。因为不二是双电池的,他的都是双备份的荣誉,所以它可靠性会比较好。这个其实是我们物2的搭载的维世和叉7的一个CDD的一个大小尺寸的一个比例和和我们现在一个主流的电影机一个热的之间相去比,其实看差5S肯定是小了。但是插旗其实已经比瑞的药略大最大一圈了,已经完全可以做到4K这样的一个,但他如果是足够大的话,他2400万像素的单章的进度也会有很大的提升。
有了飞机以后,第2个肯定就是I飞行控制系统。这个有几类?一类呢?属于免费的。这一类就像我们可能在苹果或者什么都可以有像大将自己的一些要控的一些。但是我这里说的是叫飞控,跟大家自己的DDI go是可能还不一样。非控制的是叫飞行控制,不是叫飞行遥控。他是可以去通过设定飞机的一个航线来自动完成这样的一个飞行任务。因为如果你要去做这样的一个数据采集的话,靠人工手工去这样去去非是非常的不精准的。一般的都是用控制软件,这里向大家D家狗,一家狗,GSPPXPX for D包括out他们都是可以免费去帮你做航线规划和和这样的一个设置一些一些航线的密度、高度参数这些都可以做。
第2类的可能是收费的这样的一个地面的飞控软件,像荔枝,包括大家自己出了连飞控die,计算一体的那种大家制图。UGCS这些都是收费的,它功能比较强。当然因为它是收费,所以它对一些安全性和一些应用性的一个支持会更好。还有一类就是开源协议的地面站这一类有很多。拿了开源协议自己做的,包括自己对做一些调试以后的二次开发的这一类,如果你是非常懂这块的航母飞控软件这一块的,我觉得你可以用,但是如果你要是不懂的话,这个东西还是少碰,因为这个东西有很多的bug,特别容易飞机出去以后就回不来了。
在三维重建这一块其实有大概三类不同的方式,第1类属于是购买版权,然后通过单据或者是自建集群自己来计算。这一类在初期的软件投入成本其实蛮高的,因为包括软件,包括硬件价格都不菲。这一类其实包括cc、for lee的收费版,或者cm或者是EPS包括大江制图。而第2类就是像儿童这种,它是按照下士服务来收费的。整个基本上是按照像素规模去来说,你上传多少像素,按照怎么样的一个收费标准?这块可以做,但是这一块整体的计算成本是有点高的。
因为小小规模的制作没有问题,但是如果是真的是工程项目比较大。比较大范围的,而且对于数据采集精度比较高,总的采集数据量比较多,这样的情况下面,这个的价格相当的高。第3类是集群计算,基本上都是自建集群,或者说已经有了一个这样的私有云的这样一个计算平台,然后是按照照片的分辨率和数量,专门提供这样基金收费给你,这个相对来说门槛比较低,你实际有多少张照片,多少分辨率,就按照这个去收就可以了。所以从这边三个东西来加上去来看,像飞行平台、地面站和计算服务这三类,我觉得这三类分别是三个不同类型的,应该是1、对于飞行平台的平台来说的话,可能吉林市是一个成本最低的一个可靠的这样的一个产业平台,向地面站这块,但还是大家自己做的。
免费的,虽然功能不是很强,但是它可以做到一个相对来说和大疆自己飞机比较好的一个匹配度。最后就是说计算这一块,我还是建议大家可以试找专业的集群计算的这样去做。OK我这个简单讲一下,我还有个案例可以给大家看一下。OK,大家现在可以看到我这个屏幕吗?寻总看不到,你需要把有共享可以了。OK现在可以可以。OK。我把我们南京华商融资谷这个项目给大家稍微简单介绍一下,因为这个项目我们跟了大概有快两年多了,这个项目从一开始项目立项开始,我们就一直在跟设计方一起在整个项目都有一个一个是做现场数据采集,一个是分阶段帮他把数据作为归档,所以这个项目整个延续的可能相对来说比较完整。
这个项目整个区域大概有两平方公里,酒店趋势它首期很小一块,然后另外一块是一个大概有三个鸟巢那么大的一个室内的主题公园,这个是当时的设计方的一个设计图纸,所以从从一开始的时候就设计方案已经把整个山当成是设计里面的一个重要的内容。他把其中两个山头是做了两个巨大的一个城市级别的狮子的这样雕像,这个是实景模型,大家可以对比看一下。刚刚那个位角度和这个角度是一样的,从建筑到两个雕塑的位置,我也是找了个同样的角度的一个试镜,所以它整个是整个是坐落在一个矿坑里面,而且是在矿坑的一个离悬崖不到30米,然后是一个三面被包围的这么一个地形。
是。这个是15年12月份第1次去现场,是当时整个场地的一个现状。矿坑在他被废弃掉以后,其实做了好长时间的南京市的垃圾填埋场,所以大家可以看到光矿坑中央其实已经被垃圾填埋的非常的高,垃圾填埋总共大概是清理掉了以后,标高下去了大概35米。这个阶段是垃圾正在清理,整个的一个山底下的所有的垃圾全部被挖掉了,然后这个时候大家可以看出整个的形态已经是出现了大的一个原来设计方案的,然后我们可以用技术工具去对整个需要去挖掉的这块区域里面,一定标高的高度下面多少容量的土方,因为有一个快速的这样的一个工具可以来完成。
数字化的模型非常快速的可以做出这样的评估。后面这个阶段包括施工,包括设计方案的一个标高修正,都提供了最第1手的原始的资料。对。更抵到挖到这个阶段的时候,是已经挖到26米了。这个已经是基本上结构封顶以后,其实有一点小小的方案修正,大家看,可能在高的楼的右侧这块有一个山衡量,其实在设计过程当中,其实做了修正以后,善良要被挖掉,刮掉以后是重新再做一个做一个酒店的副楼。这个已经是在临近基本上就要准备开业了。
去年9月份,所以大家可以看,对于像项目的不同的阶段,这样的一个工程档案,其实酒店其实只是他整个项目的一期工程,2期正在进行,而且2期的整个的规模比它还更大。OK我这样我因为今天时间也不早了,已经9:00了,我正好控制到这里,感谢大家,谢谢赵会长,谢谢庄总。如果以后有什么需要大家互相交流的,可以大家一起再找时间。谢谢。好,非常感谢陈总的精彩分享,我看大家也有一些问题,在陈总在边上聊天这一块有几个问题,我们挑三个问题给大家解答一下,你看可以吧?
OK我看一下。能看到吗?我看哪一个我看有人在问。问他大家实体模型怎么样?倒不倒并不软件对吧?有一个闭幕软件这一块的话,很多的标准的接口,基本上是我们拿通用的三维数据接口都作为一个衔接的接口。常用的就是OPJ和SBX这两个接口是完全可以用的,因为这里可能涉及到像以前我们可能会碰到模型进去了,些都没进去,或者是说有些可能贴图的位置对不起来,所以基本上现在我们现在统一采用标准的obd和FBX最快的问题,可以统一解决掉了。
闭幕这块有些可能简要的模型,可能甚至用不到像用这么大的数据量,因为我们一般的话原始数据出来以后,先按照不同的bim他们使用的要求分成,先评估出来不同的数量级。比如说我现在可能对于他只需要一个外观的内容,还是需要整体的数据,因为这块的数据量其实有点大。整个的一个大的一个场景的话,像一般一个平方公里左右的一个大场景的话,整个的上角面可能会在大概2000到8000万个面。一般的话我们现在和很多并不公司一起在协作的过程当中,我们一般都是在控制在500万到800万个面,在数据优化好以后,在提交给我们的合作方,我不知道大家能解决你们的问题吗?
我们再回答两个问题,你陈总你是能看到边上我们这样的看到我能看到刚刚九新的有新的在!我看看刚刚时时警。10斤怎么搞我没听懂,就数据发布这一块的话是不是有人有疑问,对吧?我看看数据发布移动端,数据化不移动端的话,有好些的平台是直接可以支持的。本特利他自己有可以像用CCCC的话可以直接导出作为一个移动端发布的数据格式,其他的格式的话,一般的话我们都转成web gl,能够支持的这样的一个数据。然后比如说像C证这样的平台,基本上是可以兼容。
外部接O的其他的忌食,或者是从B木这块输出去的数据。为陈总我看有在问B魔音、自动分优衣、精细度、不平衡的这种状态。由于这块确实是在三维数据导出这一块,衔接这块会大家可能都会碰到的问题了。这一块我们是过了,包括由于是阿威尔的这些引擎基本上是要开到贴图,精度最大。因为经精细度不平衡,其实我觉得不是因为模型的问题,而是因为加载的问题。是因为总的数据量太大,总的数据量太大以后,造成即时加载,超出了硬件设备或者软件的整改力。
所以一般情况下不建议超过1000万的面。虽然有些软件可能可能它能够号称是能支持2000万,稍微再出头一点,但是基本上都是瘫痪了。所以我觉得一般的话,我觉得800~1000万面之间的数据是可以可以比较正常的去使用。可以先从控制整个文件的总的这样的一个面片的数量,然后再重新做有一贴图。这样基本上后面你如果是在打开了以后,把高高分辨率贴图打开以后,整个的一个在游戏引擎或者其他引擎里面的表现力度会还可以。
两个模型怎么结合是吧?刚刚我看有个胡总在问,是指的应该是跟闭幕应该是应该是B5。对。所以其实两个模型怎么结合?我觉得现在我们看到的有好几个朋友,他们闭幕这块东西再做衔接的,基本上是向着ob界这块是做正常衔接的。有时候他们会调用一下max做一部分的模型的一些预处理。因为我看另外一个有朋友说是O pg模型打到right里面,倒不进导到3D,max里面材质会丢失吗?对吧?max里面这个情况应该现在新版按照最新的APP标准是应该没有什么问题的,但是load里面确实有这个问题,所以所以像OPG格式的文件跟弱者之间,我觉得可能你要用最新版的慢歌或者去倒这个文件了,原来这里面确实有这个问题。
外部及L是个格式,对。我看吴总说把面转点云。点名是可以的。而且数据量数据量更小。因为青协的模型数据有一个最大的问题是,其实他的贴图的数数据量太大,而且贴图因为是实时渲染,他对于像显卡CPU的系统占用的要求会比较高。行,我看其他没有什么。这没有人问了,大家要是碰到obd格式,如果是碰到问题,我是建议大家可能是一下FBXABS有。陈总你也在上海大学里边是吧?我在大学里面?有在大群里边,我们有问题也可以到时候在群里面提问。
也可以这样,或者庄总不是这里有一个上海的不是有个无人机的群,我们可以到时候再一起再讨论,没问题的。可以,然后有在大群里的,然后大家可以在先问问其他群,到时候再拉拉到无人机群里边,也可以对张总发一下,到时候让张总发一下,让明刚也发一下。行,今天又感谢陈总的这种精彩分享,也感谢大家对无人机这一块数据重建感兴趣。接下来我们会每周都会有一次这样的分享,感谢大家支持。好,今天就到这里,好,谢谢陈总,谢谢大家。